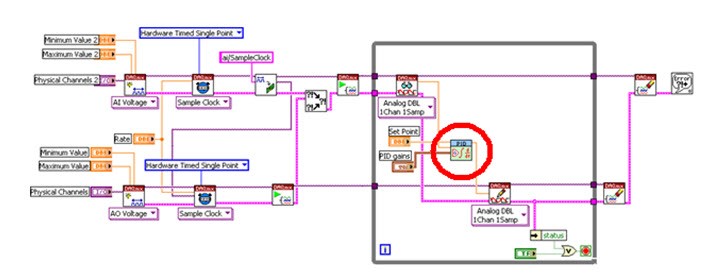
LABVIEW Vi for implementing a single channel PID controller:
https://knowledge.ni.com/KnowledgeArticleDetails?id=kA00Z0000019QlFSAU&l=en-IN
Use queue and channel wires
Use QUEUE to communicate between analog read and analog write task
One portion of code is
creating (or producing) data to be processed (or consumed) by another
portion. The advantage of using a queue is that the producer and
consumer will run as parallel processes and their rates do not have to
be identical.
https://knowledge.ni.com/KnowledgeArticleDetails?id=kA00Z000000P7OfSAK&l=en-IN
https://www.ni.com/en-in/support/documentation/supplemental/16/channel-wires.html
PID control labview example video:
https://www.youtube.com/watch?v=lyw_Ygeti3I&ab_channel=NIDevZone
https://www.youtube.com/watch?v=qMydcfZ_ZSs&ab_channel=FlexRIO
Thesis on PID control with labview
http://www.diva-portal.org/smash/get/diva2:757138/FULLTEXT02
https://www.ni.com/en-in/innovations/white-papers/06/pid-theory-explained.html
Simple on off control LABVIEW
 |
| Basic on off control using labview |
|
 |
Hardware timed PID control using shared sample clock and trigger
|
PID control with python and NIDAQMX
Edit on 15 Oct 2022
From https://forums.ni.com/t5/Multifunction-DAQ/Continuous-write-analog-voltage-NI-cDAQ-9178-with-callbacks/td-p/4036271?profile.language=en
1) Your code comments refer to wanting to be able to update output
signals at 100 Hz, presumably under software control. I assume this
means you want <= 10 msec latency between your software deciding on
an output value and having that output appear as a real world signal.
This is pretty tricky to accomplish with a buffered output task,
and (I suspect) likely impossible when the device is connected by USB or
Ethernet. You may need to approach this with an unbuffered,
software-timed, "on-demand" task and then live with the corresponding
irregularities and uncertainties of software timing
2) The rule of thumb wouldn't apply to situations where low latency is the
priority. A lot of typical data acq and signal generation apps don't
need real-time low latency. They generate pre-defined stimulus signals
and collect data for post-processing later. The rule of thumb works
well in those cases, allowing live displays with only *moderate*
latency, enough for an operator to see what's going on.
3) In the past when I experimented with trying to do low latency hw-clocked
AO, it wasn't trivial to get < 10 msec even with a PCIe device. I
recall that in order to get there, I needed to set up a few different
low-level and fairly advanced DAQmx properties to non-default values. I
wouldn't have expected the defaults for a cDAQ system over USB to
support that kind of usage so easily.
4)
Sample rate and samples per channel
Hardware timed single point


